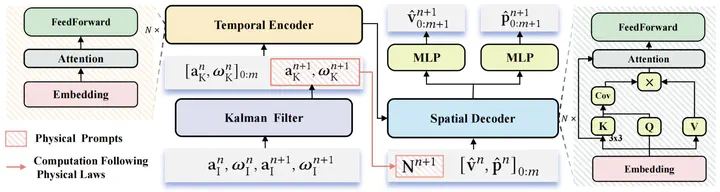
 FormerReckoning framework overview
FormerReckoning framework overviewAbstract
Although modern localization methods have achieved remarkable accuracy with various sensors, there are still some circumstances where only proprioceptive sensing works (Inertial Navigation). However, localization and navigation using only IMU sensors (costing less than $1000) still face significant challenges such as low accuracy and large cumulative errors when using traditional filter methods. Furthermore, AI-based approaches, while promising, often yield unpredictable and unreliable outputs. This paper proposes FormerReckoning, an inertial localization estimation framework for wheeled robotics that incorporates physical prompts into a Transformer framework to enhance translation estimation accuracy. Our tests show that FormerReckoning not only reduces mean translation errors to 0.72% but also surpasses all baseline models in performance, demonstrating its potential to provide reliable and precise localization in a cost-effective manner.